Mine Detection Drone, Mine Explosive Finder Drone
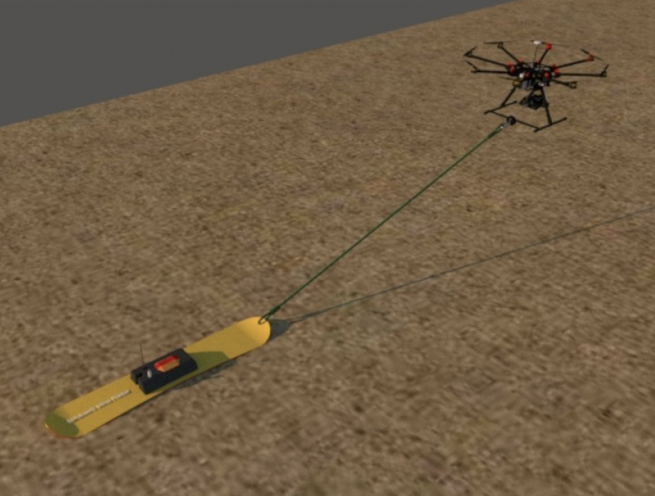
The Madoors USA Mine Detection Drone System is a proprietary sonar-type radar drone system that draws the ground-penetrating radar array over the minefield — creating a complete 3D map of all mines, explosives, and unexploded ordnances buried in the ground, with exact GPRS coordinate location of every detected mine transmitted wirelessly to a computer mapping system. The radar system is designed to slide along the ground surface without getting stuck in any terrain condition — stony, rocky, or sandy — providing continuous, reliable scanning coverage across all minefield terrain types encountered in real demining operations.
Following the 3D mine map generation, tank mines are removed by demining robot and satellite-controlled unmanned land vehicles without any personnel entering the minefield. Remaining personnel mines and heel mines are cleared by robot insertion and controlled detonation. The complete operational sequence guarantees that the mined area is 100% cleared of all mines and unexploded ordnances before the human element enters the field — with a complete X and Y coordinate map of all mine and ammunition locations delivered to the client.
TECHNICAL SPECIFICATIONS
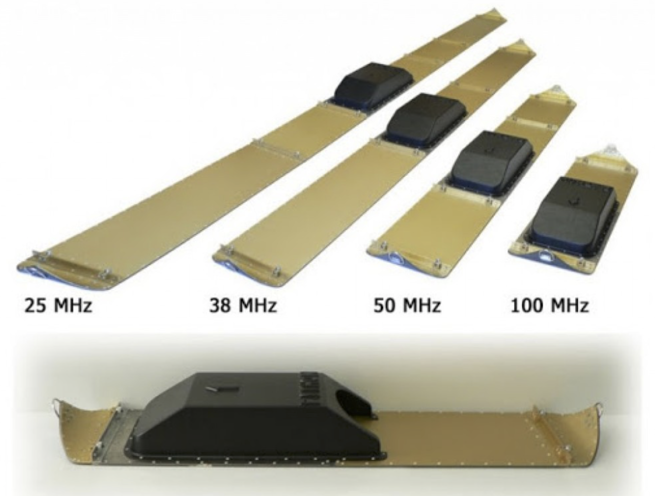
The Madoors USA mine detection drone carries a privately designed sonar-type ground-penetrating radar system — the radar draws over the minefield surface, scanning the ground volume below to detect the density anomalies and metallic or non-metallic signatures of buried mines, explosive devices, and unexploded ordnances at all burial depths used in standard mine-laying practice.
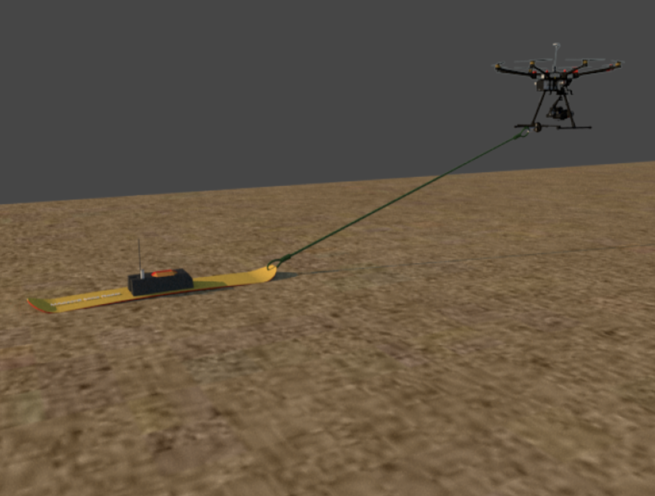
The radar system slides along the ground surface during scanning — maintaining consistent ground contact and sensor-to-ground distance across the full scan width regardless of surface irregularity. The sliding ground contact design is specifically engineered to operate without getting stuck in the three primary challenging terrain conditions of demining operations — stony ground, rocky terrain, and sandy or loose soil — providing continuous, uninterrupted scanning without the terrain-induced stops and repositioning that would create coverage gaps in the 3D mine map.
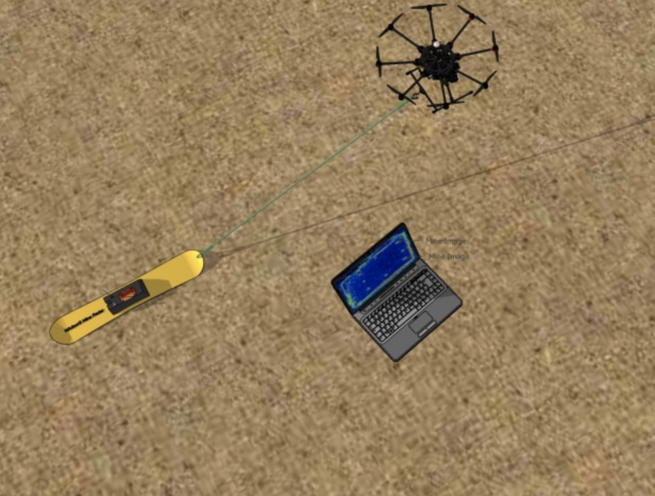
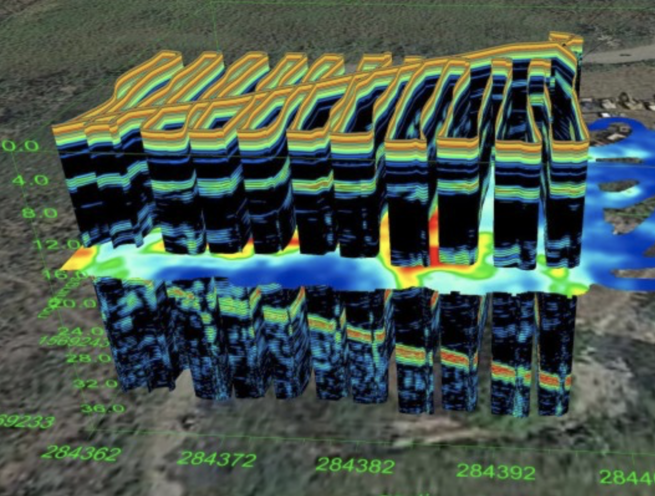
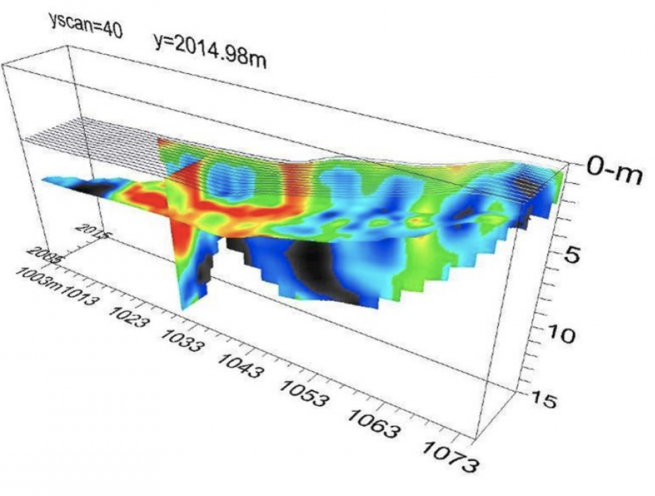
3D scanned graphics of the ground volume are transmitted wirelessly to the operator's computer in real time — building a continuously updated 3D visualization of the detected mine and ordnance positions as the drone completes each scan pass. All detected mines are located exactly in the GPRS coordinate system — providing GPS-referenced X and Y coordinates for every detected mine and ordnance position in the surveyed area.
The complete operational mine clearance sequence integrates the Mine Detection Drone with the Madoors USA demining robot and satellite-controlled unmanned land vehicles — the drone provides the mine location data, the demining robot removes tank mines without entering the minefield, satellite-controlled vehicles transport removed mines to a safe destruction point, and additional robots are inserted into the field to detonate remaining personnel mines and heel mines.
KEY FEATURES
Proprietary Sonar-Type Ground-Penetrating Radar — 3D Mine Mapping
The company-designed sonar-type radar system generates a complete 3D map of the buried mine and ordnance inventory in the surveyed area — providing the three-dimensional spatial information required to locate each mine's exact position, depth, and orientation for safe removal or detonation. The 3D mapping capability is the fundamental operational advantage over 2D detection systems — the operator and demining robot receive complete positional data for each mine rather than a ground surface detection that requires subsequent probing to determine mine depth and orientation.
All-Terrain Sliding Ground Radar — No Stuck Conditions
The ground-sliding radar design specifically addresses the most common operational limitation of ground-penetrating radar demining systems — terrain-induced operational stops caused by rocks, stones, and loose sand that prevent continuous scanning across real-world minefield terrain. The stuck-free design maintains continuous radar contact with the ground surface across all terrain conditions, providing complete, gap-free 3D map coverage without terrain-induced interruptions that would leave undetected mines in the cleared area.
Exact GPRS Coordinate Location — Every Mine Mapped
The GPRS coordinate system provides exact geographic positioning for every detected mine — the coordinates are accurate to the level required for precise demining robot navigation to each mine position and for the post-clearance coordinate map delivery to the client. GPS-referenced coordinates eliminate the positional ambiguity of relative distance measurements — every mine is located in the absolute geographic coordinate system, allowing the coordinate data to be used for demining robot guidance, client documentation, and international mine action authority reporting.
Wireless Real-Time Data Transfer — Immediate Operator Access
Wireless transmission of the 3D scanned graphics to the operator computer provides immediate operator access to the mine location data as it is generated — rather than requiring post-scan data download before clearance operations can begin. Real-time data availability allows the clearance sequence to begin as soon as the drone completes the first scan passes, reducing the total operational time from mine survey start to field clearance completion.
Tank Mine Removal Without Minefield Entry — Personnel Safety
The integration of the mine coordinate data with the demining robot and satellite-controlled unmanned land vehicles allows tank mines to be removed and transported to a safe destruction point without any personnel entering the minefield. The mine coordinates from the drone survey guide the demining robot to each tank mine position, the robot removes the mine intact without detonation, and satellite-controlled vehicles transport the removed mine to the safe point for controlled destruction. This complete non-entry removal sequence eliminates all personnel exposure to mine detonation risk during the tank mine removal phase.
Personnel Mine & Heel Mine Robot Detonation
After tank mine removal, remaining personnel mines and heel mines — which are too small and numerous for individual robotic removal — are cleared by inserting robots into the field and detonating the mines in place. The robot detonation of personnel and heel mines eliminates the need for manual mine prodding and neutralization by human deminers — the most dangerous phase of conventional manual demining — replacing it with remote robotic detonation that removes all personnel from the detonation risk zone.
100% Clearance Guarantee — Last Mine Assurance
The complete operational sequence — drone 3D survey, robot tank mine removal, robot personnel mine detonation — guarantees that the mined land is 100% cleared of all mines and ordnances before the human element enters the field. This last-mine assurance is the critical safety requirement that distinguishes the Madoors USA system from detection-only systems — the clearance guarantee confirms not just that mines have been detected and mapped but that all detected and undetected mines have been removed or detonated before human access is permitted.
Complete Coordinate Map Delivered to Client
The complete X and Y coordinate map of all mine positions, exploded ordnance locations, and unexploded ordnance locations in the surveyed area is delivered to the client — providing the documentation required for international mine action authority area release certification, post-clearance land use planning, and historical record of the minefield extent and clearance. This coordinate map delivery transforms the mine survey data into a permanent client-owned record of the hazard and clearance history of the land area.
COMPLETE OPERATIONAL SEQUENCE
Phase 1 — Mine Detection Drone Survey
The mine detection drone draws the sonar-type ground-penetrating radar over the complete minefield area — the sliding ground radar scans all terrain conditions without interruption and transmits 3D graphics wirelessly to the operator computer in real time. GPRS coordinates are assigned to all detected mines, explosives, and unexploded ordnances. The complete 3D mine map and coordinate database are generated.
Phase 2 — Tank Mine Removal by Demining Robot & Satellite Vehicles
Demining robots navigate to each tank mine position using the coordinate data — removing each tank mine intact without detonation. Satellite-controlled unmanned land vehicles transport the removed tank mines to the designated safe destruction point. Tank mines are destroyed at the safe point under controlled conditions with no personnel exposure.
Phase 3 — Personnel Mine & Heel Mine Clearance by Robot Detonation
Robots are inserted into the field and navigate to the personnel mine and heel mine positions from the coordinate map — detonating each mine in place under remote robotic control. All personnel remain outside the detonation zone throughout this phase. The field is systematically cleared mine by mine until the complete coordinate map has been addressed.
Phase 4 — 100% Clearance Certification & Coordinate Map Delivery
The cleared field is confirmed as 100% secure — all mines and ordnances detected in the survey have been removed or detonated by the robotic clearance sequence. The human element enters the field only after robotic clearance confirmation. The complete X and Y coordinate map of all mine and ordnance locations is delivered to the client for area release documentation.
DEPLOYMENT SCENARIOS & USE CASES
Madoors USA Mine Detection Drones are deployed across the full range of military and humanitarian demining operations requiring comprehensive 3D mine mapping and robotic clearance.
- Post-conflict humanitarian demining area survey and clearance
- Agricultural land mine survey and robotic clearance
- Military route proving and lane clearance operations
- Border security minefield systematic survey and clearance
- National demining program mine field survey operations
- UN and international mine action authority survey operations
- Post-conflict urban area mine and UXO survey
- Military forward area minefield reconnaissance mapping
- Peacekeeping mission area clearance mine survey
- Remote and inaccessible minefield drone survey operations
- Anti-tank mine field systematic removal operations
- Emergency vehicle route clearance mine survey
- Military training area mine and UXO survey
- Post-disaster mine displacement survey operations
- Any demining operation requiring 3D mine mapping with GPS coordinate delivery