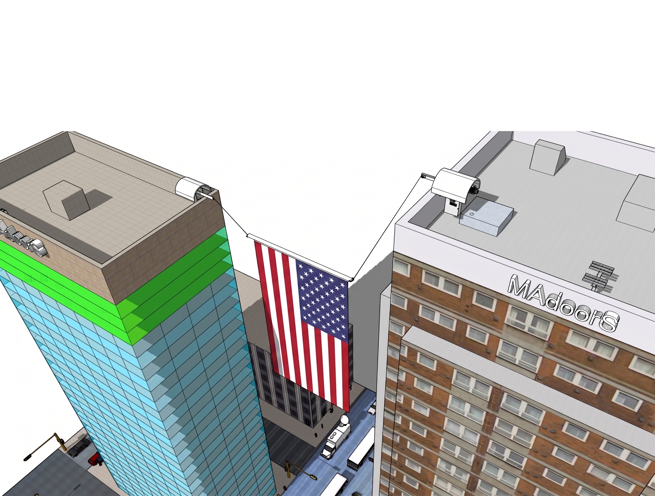
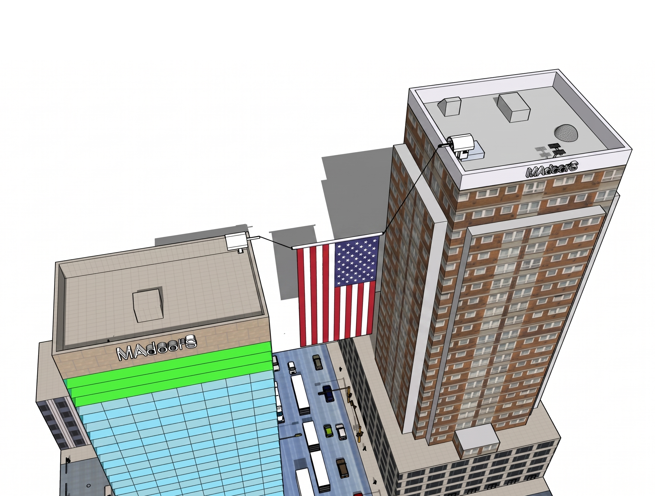
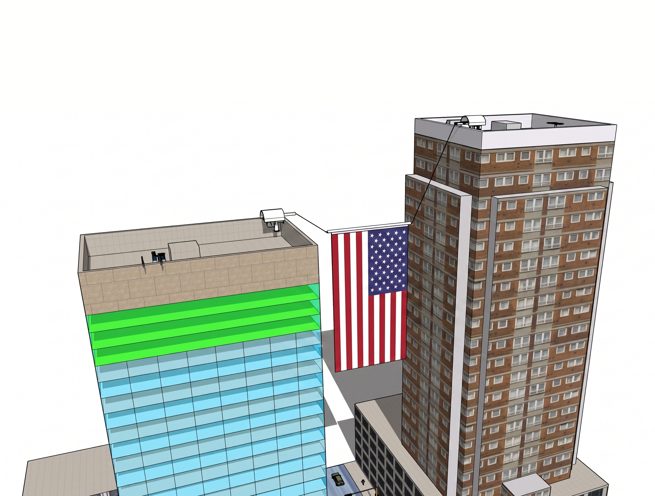
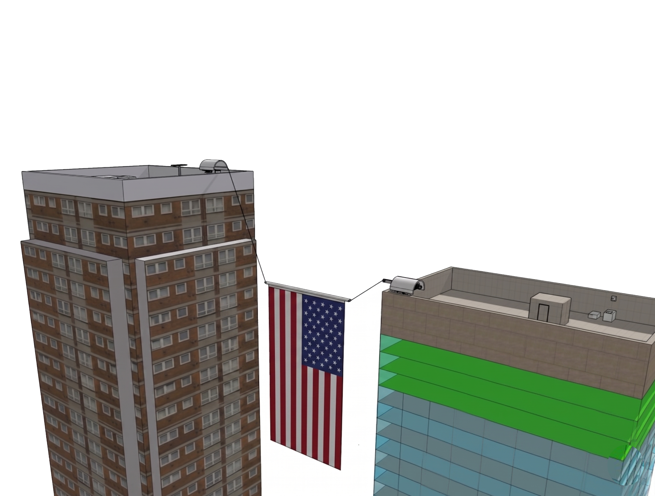
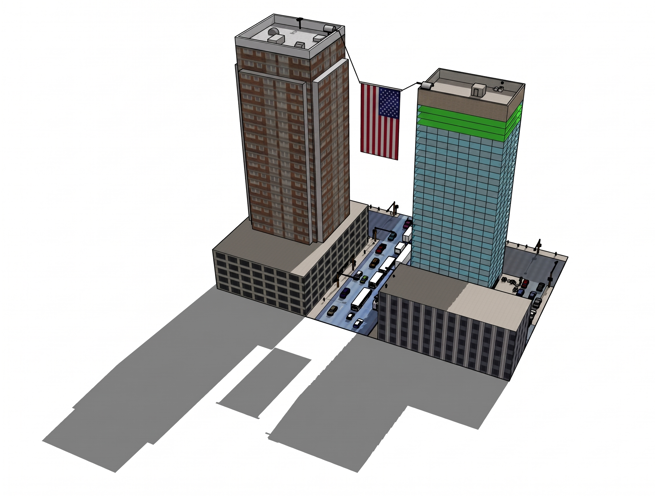
Automatic Motorized Flag Hanging System For Between Buildings and Towers
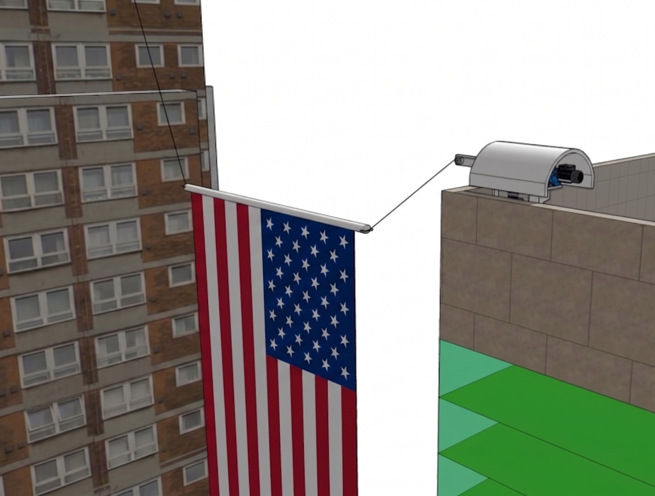
The Madoors USA Automatic Motorized Flag Hanging System Between Buildings and Towers is a dual-motor remotely controlled inter-building flag hoisting system — hanging large flags and banners between two buildings or towers with independent motor control on each building, PLC control system with Arduino processor software enabling wireless communication between the two motors, and rope descent to ground level for safe ground-level flag attachment with flag-lock hooks. The wireless end-switch communication between motors — when the flag reaches the end switch point on one side, that motor wirelessly transmits the stop signal to the motor on the other building — is the patented engineering feature that allows flags to be hoisted between buildings of different heights and at different distances without tension differential, tearing, or misalignment.
TECHNICAL SPECIFICATIONS
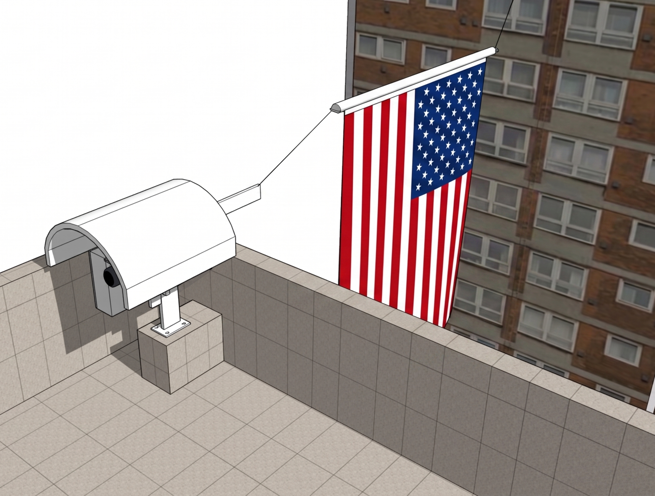
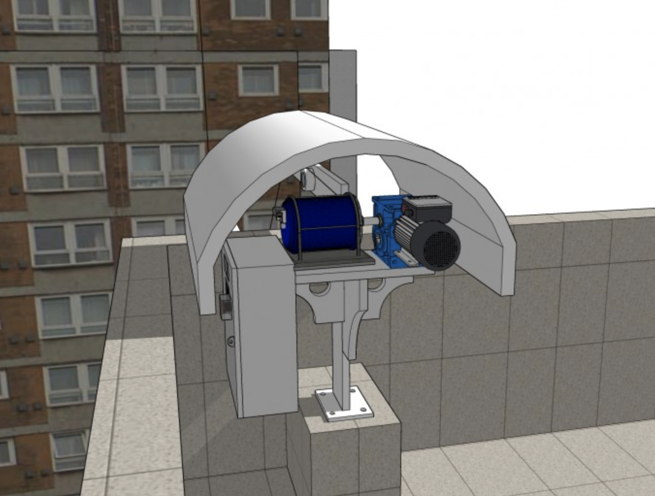
The Madoors USA Between-Buildings Flag System uses two complete motor and panel units — one installed on each building or tower. Each motor unit has its own control panel, PLC system, Arduino processor, remote control receiver card, and rope and pulley mechanism. The two units operate as a coordinated pair through the wireless communication protocol programmed into the Arduino software — each unit can be operated independently for setup, adjustment, and maintenance, and both units operate simultaneously for standard flag hoisting and lowering.
The rope descent function is the ground-level flag attachment mechanism — when the flag is to be hoisted, the operator presses the descent command and the motor ropes lower to the ground. The flag is attached to the steel ropes at ground level using the flag-lock hooks, eliminating the need for working at height during flag attachment. The ground-level attachment is the safety feature that allows the system to be operated without elevated access equipment and by any authorized personnel regardless of height-access capability.
The simultaneous and independent motor control provides the tension management required for different building heights and different rope run lengths. When the two buildings are at different heights or the rope lengths differ, simultaneous equal-speed operation would create tension differential across the flag — the building with the shorter rope run would complete hoisting before the other, creating the tension and potential tearing that would damage the flag. The independent motor control allows the operator to manage the two motors at different speeds to compensate for height and length differences, arriving at the full-hoist position simultaneously without tension.
The Arduino processor software manages the wireless inter-building motor communication — when the flag reaches the end switch position on the right motor, the right motor automatically transmits the wireless stop signal to the left motor, stopping both motors simultaneously regardless of whether the left motor has reached its own end switch. This synchronized stop directly prevents the over-tension that would occur if one motor continued operating after the other had reached the fully hoisted position.
Each building unit has a separate remote control receiver card — the operator can control each motor individually from a single remote control handset that addresses each receiver card independently, or can issue simultaneous commands to both cards for standard equal-height building operation.
KEY FEATURES
Wireless Inter-Building Motor Communication — Synchronized Hoisting
The wireless communication between the two building motor units through the PLC and Arduino processor software is the unique engineering feature that makes reliable inter-building flag hoisting possible regardless of building height difference — the end switch on one motor wirelessly stops the other motor at the correct position rather than both motors blindly running to their individual end stops. This synchronized stop directly prevents the flag tearing and structural stress that would occur if the flag was pulled tight from one side while the other side was still hoisting. No other inter-building flag system manufacturer has implemented this wireless motor synchronization.
Ground-Level Rope Descent — Safe Flag Attachment Without Height Work
The rope descent to ground level for flag attachment directly eliminates the working-at-height risk during flag installation — the operator does not need ladder access, scaffolding, or any elevated work platform to attach or remove the flag. The motor ropes descend to ground level where the operator attaches the flag using the flag-lock hooks on flat ground, then the remote control hoists the flag to the full display position. This ground-level operation is both the safety compliance advantage — eliminating fall-from-height risk — and the operational convenience advantage — any authorized person can attach and hoist the flag without specialist access equipment.
Independent & Simultaneous Dual Motor Control
The independent and simultaneous dual-motor control modes provide the operational flexibility required for the complete range of inter-building configurations — simultaneous operation for equal-height buildings where the same speed produces equal tension, and independent operation for different-height buildings where speed adjustment on one motor compensates for the height difference. The separate remote control receiver card on each motor unit directly enables this independent control from a single operator position.
PLC & Arduino Communication — Building Height Difference Management
The PLC control system and Arduino processor software managing the communication between the two building motors directly solves the primary engineering challenge of inter-building flag systems — when two buildings have different heights and different rope run lengths, a purely mechanical equal-speed system would create unequal tension across the flag during hoisting. The PLC and Arduino software compensates for these differences through the synchronized communication protocol, directly enabling the system to operate between any two buildings regardless of their height differential.
Flag-Lock Hooks — Secure Ground-Level Attachment
The flag-lock hook attachment system on the steel ropes provides the secure, reliable flag connection required for the outdoor service environment where the flag is exposed to wind loading throughout the display period. The hook design locks the flag attachment points against the mechanical loading of wind-induced flag movement — preventing the flag from working loose from the hooks during display. This secure attachment is the continuous reliability requirement for flags displayed between buildings in all weather conditions.
INSTALLATION & OPERATIONAL SEQUENCE
Building and Tower Assessment
The two installation buildings or towers are assessed for motor mounting position, rope routing from the motor to the ground-level attachment point, structural support for the motor and rope tension loading, wireless communication range between the two building motor units, and electrical supply at each building position.
Motor and Panel Installation — Both Buildings
One motor unit, control panel, PLC, Arduino processor, remote control receiver card, and rope and pulley system are installed on each building at the confirmed mounting positions. Rope routing from the motor to the ground-level attachment point is completed.
Arduino Programming and Wireless Communication
The Arduino software is programmed for the specific building height and rope length parameters of the installation. Wireless communication between the two Arduino units is established and the end-switch synchronized stop function is tested — right motor stop signal transmission to left motor and vice versa are confirmed.
Ground-Level Rope Descent Testing
Rope descent to ground level from both motor units is confirmed — ropes reach the ground-level flag attachment position with sufficient length for easy flag-lock hook attachment.
Flag Attachment and Simultaneous Hoist Test
Test flag is attached to both rope systems at ground level using the flag-lock hooks. Simultaneous hoist command is issued — flag is confirmed to rise evenly from both buildings at equal speed to the full display position without tension differential or fabric stress.
Independent Motor Operation Testing
Independent motor operation — each motor controlled separately from the remote control handset — is tested for height differential compensation capability. End-switch wireless stop synchronization is confirmed under independent motor operation.
Operational Handover
Complete system operational guide, remote control programming, Arduino schedule configuration, and 2-year guarantee documentation are compiled into the project handover package.
DEPLOYMENT SCENARIOS & USE CASES
Madoors USA Automatic Motorized Flag Hanging Systems Between Buildings and Towers are specified for any inter-building or inter-tower flag display application.
- Government ministry and public square inter-building flags
- Municipal boulevard and city center inter-building banners
- Military installation inter-building ceremonial flags
- Corporate headquarters twin-tower inter-building flags
- Shopping center and commercial complex entrance banners
- Sports stadium inter-tower event flags and banners
- Airport terminal inter-building national and airline flags
- Exhibition and fair grounds inter-building event banners
- Hotel and resort twin-building entrance flags
- University campus inter-building ceremonial flags
- Cultural and arts center inter-building event banners
- National monument and memorial inter-tower flags
- Border crossing inter-tower national flag display
- Any inter-building or inter-tower flag display requiring synchronized dual-motor automatic hoisting with ground-level safe attachment